About
I am an undergraduate student at the University of Pennsylvania, pursuing an Engineering degree in Computer Science with a minor in Mathematics and a Wharton degree in Statistics. I am also an accelerated master student in Robotics at the GRASP Laboratory and a summer researcher at ETH Zürich. I am fortunate to be advised by Prof. Pratik Chaudhari, Dean Vijay Kumar, Prof. Santosh Venkatesh, Dr. Andrea Censi, and Prof. Emilio Frazzoli.
I would like to develop the mathematical principles of adaptive and autonomous systems and embody these principles into efficient algorithms. My current research enables robots to actively perceive useful information from initially unknown environment and model complex environments at large scale. See Research.
I am equally passionate about teaching and actively engaging with the community to promote equity in engineering education and research. See Teaching and Community Involvement.
Research
I enable robots to become analytic perceivers that can extract scientific insights from noisy uncurated data in the wild. I enable robots to become active perceivers that can collect necessary information from an initially unknown environment for diverse tasks. I do so by developing algorithms grounded in probability theory, information theory, and game theory. I am excited about the application of my research in monitoring and modeling complex ecosystems beyond human capability, because (1) a deep understanding of ecosystems is foundational to protecting them from the escalating threats, (2) unstructured wild environments are especially chanllenging for robotics.
Publications
A robotic system for automated genetic manipulation and analysis of Caenorhabditis elegans
Autonomous Robot; Imaging System
Zihao Li, Anthony D Fouad, Peter D Bowlin, Yuying Fan, Siming He, Meng-Chuan Chang, Angelica Du, Christopher Teng, Alexander Kassouni, Hongfei Ji, David M Raizen, Christopher Fang-Yen
Proceedings of the National Academy of Sciences (PNAS) Nexus, 2023
Article Code TPV Video FPV Video
Projects
I have worked on a wide range of projects, including (1) Mapping: Semantic Gaussian Splatting, Large Scale NeRF, Active Visual SLAM, Stereo Visual SLAM; (2) Navigation: Bio-inspired Navigation; (3) Learning: Conformal Prediction, Robust Transfer Learning.
Semantic Gaussian Splatting
Gaussian Splatting; Semantic Segmentation
Developed a novel efficient algorithm to build semantic Gaussian splatting.
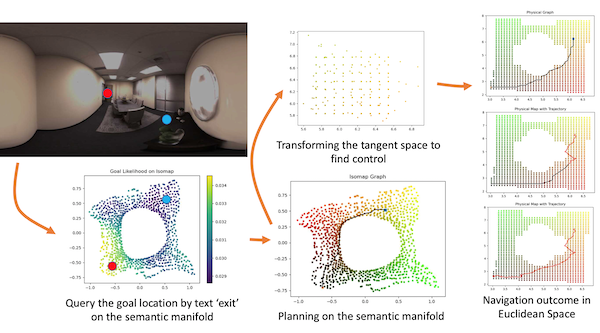
Bio-Inspired Navigation on the Manifold of Sensory Input
Differential Geometry; Control Theory, Neuroscience
Designed a novel bio-inspired navigation algorithm, using Riemannian manifold rather than classical physical or topological maps, with optimality and stability guarantees.
Large-Scale Semantic Radiance Fields
Hardware; Sensor Calibration; SLAM; NeRF
Engineered sensor tower and backpack with LiDAR, cameras, IMU, and GPS to enable large-scale and multimodal tree data collection. Created the software pipeline for lidar inertial odometry and semantic NeRF reconstruction. The sensor tower, backpack, and software pipeline are used in multiple projects including TreeScope Dataset publbished in ICRA 2024. Featured in Penn Engineering News and Penn Today News
Active Simultanous Localization and Mapping with a Quadrotor
SLAM; RRT; PID; ROS
Engineered a full-stack robotic system on my customized Duckiedrone and developed active perception algorithms on it. Featured in Penn GRASP News.
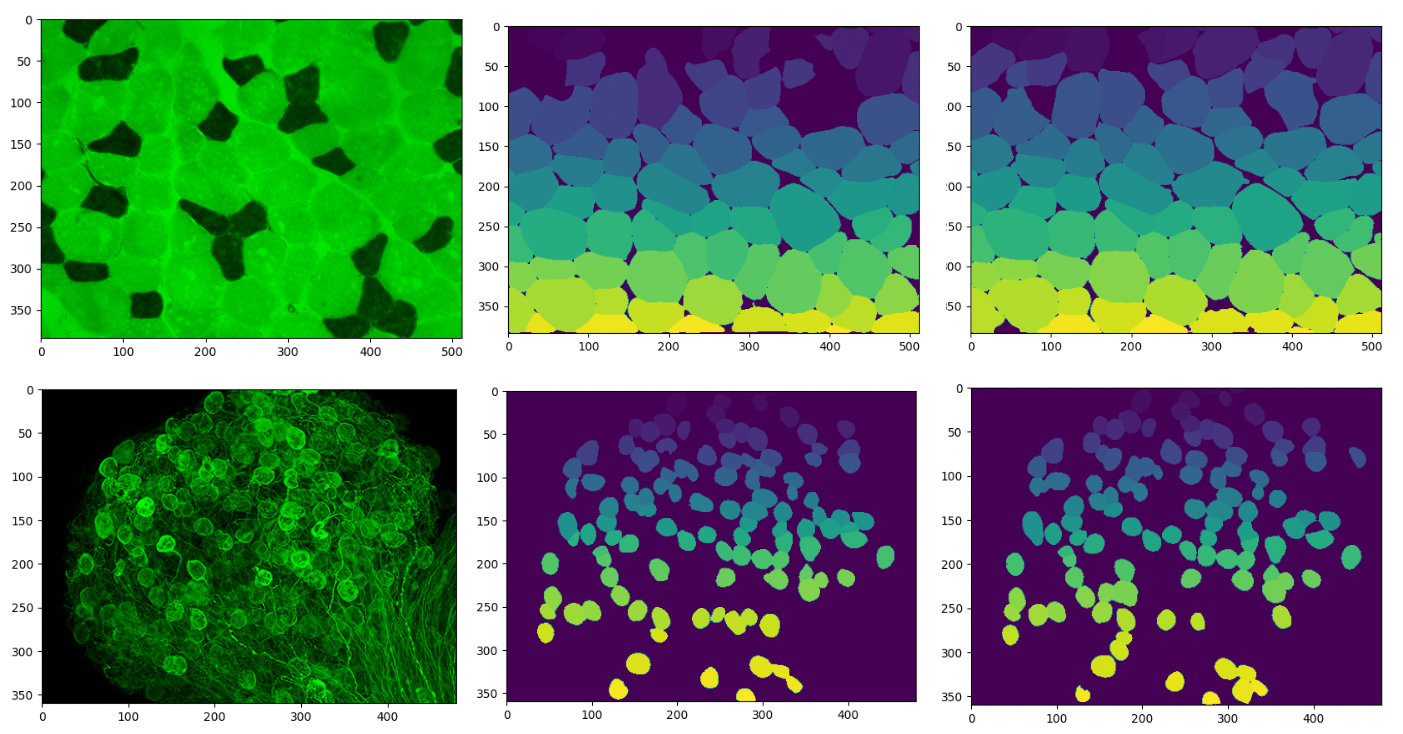
Conformal Risk Control in Generalist Cellular Segmentation
Calibration; Conformal Prediction
Developed conformal risk control of false negative rate in cellular semantic segmentation tasks.
Preventing the Transfer of Spurious Features in Transfer Learning
Information Geometry; Information Theory
Identified that the transfer of spurious features in transfer learning can be alleviated by a transfer algorithm with task interpolation which reduces the transfer distance on the statistical manifold of neural networks.
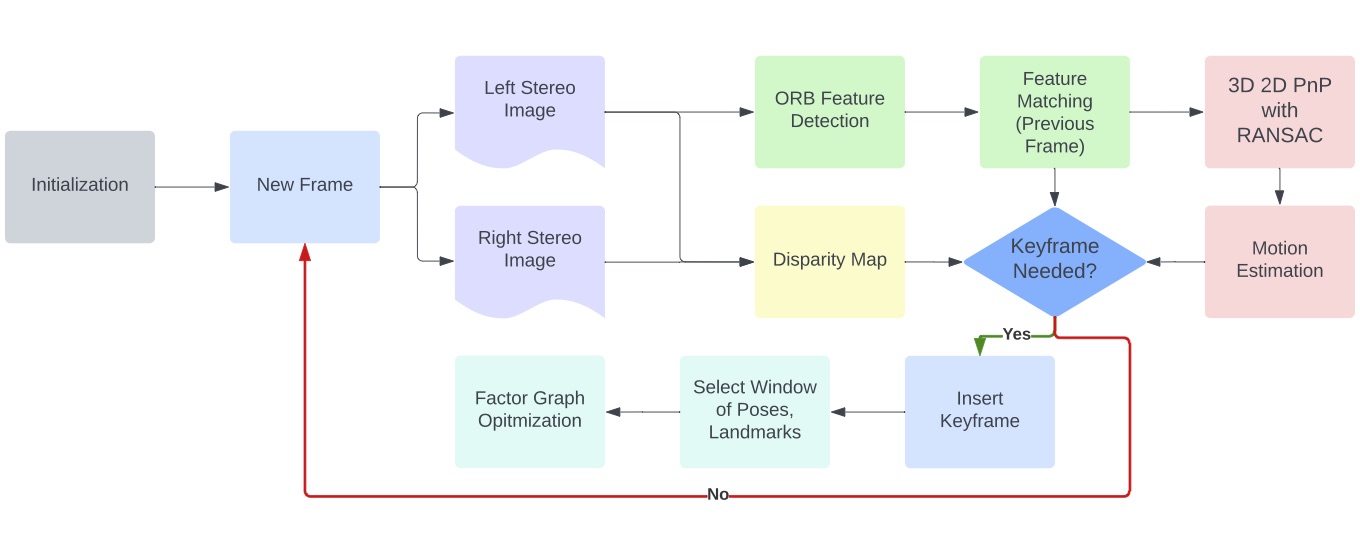
Stereo Visual SLAM with Factor Graph Optimization using Symforce
SLAM; Factor Graph
Implemented a Stereo Visual SLAM (Simultaneous Localization and Mapping) system with feature-based visual odometry.
Teaching
I aspire to be an educator who spreads knowledge and fosters curiosity, growth, and equality. Beyond my regular responsibilities of holding recitations and office hours, as well as creating and grading homework problems, I initiated several efforts to foster a vibrant and inclusive learning experience.
Course Development Assistant and Head Teaching Assistant
Penn Engineering (March 2024 - Current)
I assisted the development of the course EAS 5160 Mathematical Foundations for Machine Learning by Dr. Santosh Venkatesh for Online Master of Science in Engineering in Artificial Intelligence . My role including designing the syllabus and organize weekly contents and developing homework problems.

Teaching Assistant of Graduate-level Courses
Penn Engineering (September 2022 - Current)
- CIS 5200 Machine Learning 2022 Fall by Dr. Lyle Ungar .
To promote a deeper understanding of abstract and complex concepts, I created a 34-page material and conducted 12 recitations on machine learning topics [Material Link] . I developed concrete and detailed examples in the material. For instance, I presented mutual information in the context of active perception problems, provided a step-by-step walkthrough of CNN computation, and explained the latent Dirichlet allocation model through World Cup 'news' generation.
To maximize students' overall learning outcomese, I collected their feedback and questions through weekly online surveys and addressed their questions during recitations.
In the final evaluation, 18 out of 22 students rated my recitations as 'awesome/good.' Students' comments included: 'Clear and explicit, with detailed examples,' 'TA is always well-prepared, good timing,' and 'He reviews all the questions! Great TA.'
- ESE 5460 Principles of Deep Learning 2023 Fall by Dr. Pratik Chaudhari .
I conducted an AWS tutorial to help students launch and use their GPU instances. Additionally, I created and led a recitation on information theory, covering information theory and the information bottleneck principle in deep learning. [Material Link]
- ESE 6050 Convex Optimization 2024 Spring by Dr. Nikolai Matni .
- ESE 5300 Probability Theory 2024 Fall by Dr. Santosh Venkatesh .
I conducted recitations on real analysis, set theory, and probability theory. [Material Link]
Community Involvement
I promote equity and diversity in my communities by actively mentoring others, including underrepresented K-12 students and undergraduate researchers. I aspire to actively alleviate educational inequality both within the school and in the local community.
Peer Research Advisor
Penn Center for Undergraduate Research & Fellowships (September 2022 - Current)
- I mentored 30 first- and second-year students interested in computer science, robotics, and statistics research.
- I provided them with guidance and suggestions regarding research opportunities, research challenges, finding faculty mentors, and applying for grants.
- I compiled weekly research seminar lists to keep mentees informed about topics in their areas of interest.
- I designed and held annual Python Programming for Research Workshops to introduce Python and common Python packages to researchers from various fields, including biology, architecture, and psychology. Workshop Notebook Link .

Robotics Education Outreach for K-12 Students
Penn Engineering (September 2023 - Current)
I taught robotics to over 90 K-12 students in Philadelphia public schools. Specifically, I presented and demonstrated my robotics research to 30 7th-grade students, taught Arduino basics to 30 10th-grade students, and educated 30 high school students about mapping and planning in robotics.

Resident Advisor of a First-year Students' Dorm
Penn College House & Academic Services (August 2023 - May 2024)
- I counseled my residents on various aspects of academic and residential life, supporting them through the challenges of their first year in college.
- I hosted three lunch and dinner sessions where faculty members joined residents for conversations on academic, research, and cultural topics.
- I organized information sessions to connect residents with the abundant research resources on campus.
- I am honored to be the recipient of the Excellence in Academic & Intellectual Life Award 2024.

Rykert After School Science Program
Ridley College (September 2018 - May 2020)
- I organized a program to engage underprivileged middle school students in science experiments within a laboratory environment typically beyond their regular access.
- I led the development of intriguing experiments, including building electric wheels, constructing water rockets, and observing specimens under microscopes.
