About
I am an undergraduate student at the University of Pennsylvania, pursuing an Engineering degree in Computer Science with a minor in Mathematics and a Wharton degree in Statistics. I am also an accelerated master in Robotics at the GRASP Laboratory. I am fortunate to be advised by Dr. Pratik Chaudhari and Dr. Vijay Kumar.
My research interests lie at the intersection of robotics and learning, spanning from the mathematical foundations to the development of real-world robotic systems. I envision a future where robots extend our perception and action in the physical world. We will collaborate with robots closely for unprecedented social and scientific advancements. See Research.
I am equally passionate about teaching and actively engaging with the community to promote equity in engineering education and research. See Teaching and Community Involvement.
Research
My current focus is on building robot scientists that could autonomously operate in unstructured forest environments and actively collect meaningful observations on a large-scale. They, in collaboration with human scientists, could generate insights into the health and sustainability of forest ecosystems. These robot scientists need to be analytic perceivers who extract insights from noisy uncurated data in the wild. They also need to be active perceivers who make adaptive decisions to gather necessary information even under distributional shifts and rare events. I develop principles and practices for perception and active perception, grounded in underlying theories such as information theory, game theory, and statistics.
Publications
A robotic system for automated genetic manipulation and analysis of Caenorhabditis elegans
Autonomous Robot; Imaging System
Zihao Li, Anthony D Fouad, Peter D Bowlin, Yuying Fan, Siming He, Meng-Chuan Chang, Angelica Du, Christopher Teng, Alexander Kassouni, Hongfei Ji, David M Raizen, Christopher Fang-Yen
Proceedings of the National Academy of Sciences (PNAS) Nexus, 2023
Article Code TPV Video FPV Video

Are we really making much progress? revisiting, benchmarking and refining heterogeneous graph neural networks
GNN
Qingsong Lv, Ming Ding, Qiang Liu, Yuxiang Chen, Wenzheng Feng, Siming He, Chang Zhou, Jianguo Jiang, Yuxiao Dong, Jie Tang
Proceedings of the 27th ACM SIGKDD Conference on Knowledge Discovery and Data Mining (KDD), 2021
Arxiv Code
Projects
Large-scale Fine-grained Tree Mapping
Feature-distilled NeRF; Tree Measurement
Engineered sensor tower with LiDAR, cameras, IMU, and GPS to enable large-scale and multimodal tree data collection. Created geometric, photometric, and semantic models of trees to understand their carbon sequestration, health, and biodiversity.
Active Simultanous Localization and Mapping with a Quadrotor
SLAM; RRT; PID
Engineered a full-stack robotic system on my customized Duckiedrone and developed active perception algorithms on it.
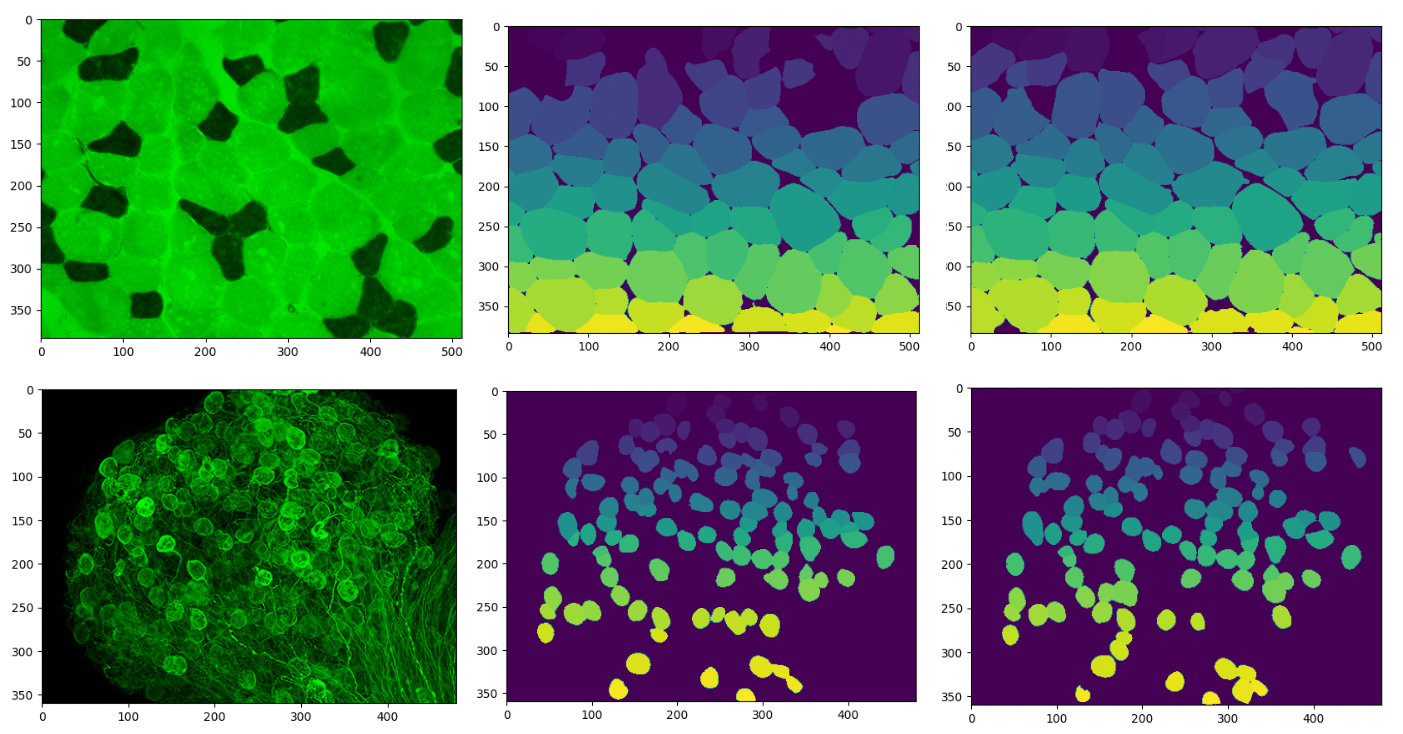
Conformal Risk Control in Generalist Cellular Segmentation
Calibration; Conformal Prediction
Teammates: Wonbin Lee, Zijian Niu
Developed conformal risk control of false negative rate in cellular semantic segmentation tasks.
Preventing the Transfer of Spurious Features in Transfer Learning
Information Geometry; Robustness to Spurious Correlations
Teammates: Wonbin Lee, Keshava Katti
Identified that the transfer of spurious features in transfer learning can be alleviated by a transfer algorithm with task interpolation which reduces the transfer distance on the statistical manifold of neural networks.
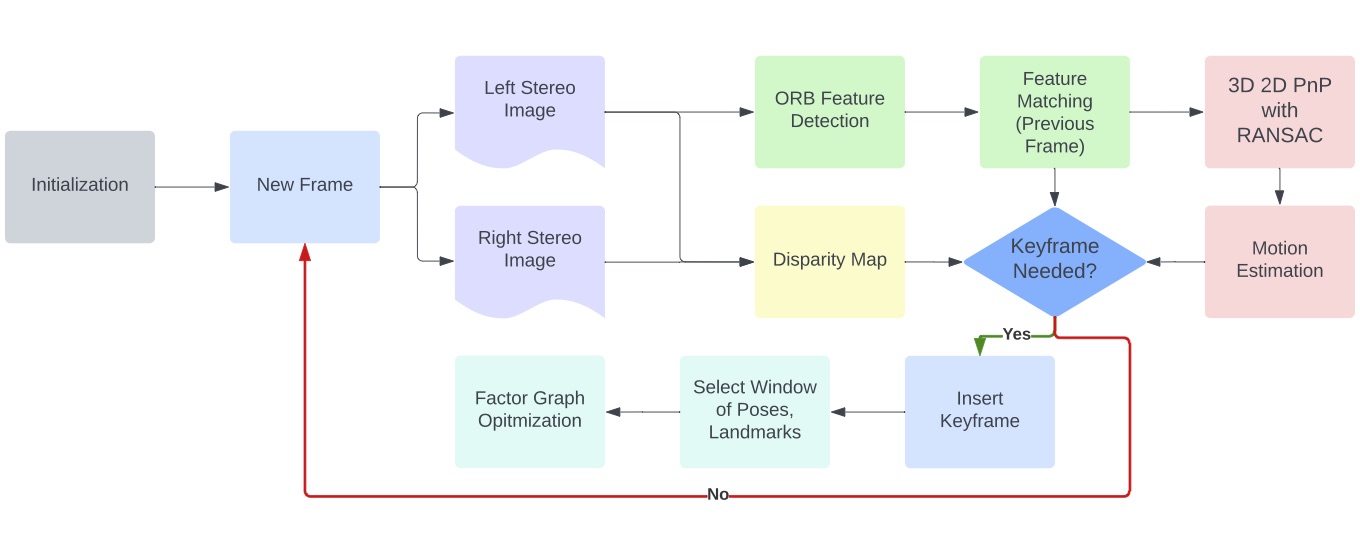
Stereo Visual SLAM with Factor Graph Optimization using Symforce
SLAM; Factor Graph
Teammates: Anirudh Cowlagi, Yijie Lu, Tyler Edwards
Implemented a Stereo Visual SLAM (Simultaneous Localization and Mapping) system with feature-based visual odometry.
Teaching
Course Development Assistant
Penn Engineering (March 2024 - Current)
Assisted the development of the course "Mathematical Foundations for Machine Learning" for Online Master of Science in Engineering in Artificial Intelligence

Teaching Assistant
Penn Engineering (September 2022 - Current)
- Teaching assistant for graduate-level courses including CIS 5200 Machine Learning 2022 Fall , ESE 5460 Principles of Deep Learning 2023 Fall , ESE 6050 Convex Optimization 2024 Spring , ESE 5300 Probability Theory 2024 Fall .
- Developed recitation materials on machine learning concepts, information theory, and uncertainty quantification. Held recitations and office hours. Created exam banks.
Community Involvement
Peer Research Advisor
Penn Center for Undergraduate Research & Fellowships (September 2022 - Current)
- Counseled undergraduate researchers regarding research opportunities, faculty mentors, and grants.
- Mentored 30 1st and 2nd year students interested in doing computer science, robotics, and statistics research.
- Compiled weekly research seminar lists to keep mentees informed about topics in their interested areas.
- Designed and held annual Python Programming for Research Workshops to introduce Python and common Python packages.

Robotics Education for Underrepresented Students
Penn Engineering (September 2023 - Current)
- Taught robotics to over 90 K-12 students in total in Philadelphia public schools who identify as being underrepresented in STEM fields.
- Presented and demonstrated my robotics research to 30 7th grade students.
- Taught Arduino basics to 30 10th grade students.
- Taught 30 high school students about mapping and planning in robotics.

Resident Advisor of a First-year Students’ Dorm
Penn College House & Academic Services (August 2023 - May 2024)
- Counseled my residents on various aspects of academic and residential life and supporting them through the challenges of first-year college life.
- Hosted lunch and dinner sessions where faculty members join residents for conversations spanning topics on academic, research, and cultures.
- Organized information sessions to connect residents with the abundant research resources on campus.
- Recipient of Excellence in Academic & Intellectual Life Award

Rykert After School Science Program
Ridley College (September 2018 - May 2020)
- Organized the program to engage underprivileged middle school students in science experiments in a laboratory environment often beyond their regular access.
- Led the development of intriguing experiments, including building electric wheels, building water rockets, and observing specimens under microscopes.
